
Lunar Reconnaissance Orbiter - Lunar Reconnaissance Orbiter
 Illustration af LRO
| |||||||||||||||||
| Missionstype | Månens orbiter | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Operatør | NASA | ||||||||||||||||
| COSPAR ID | 2009-031A | ||||||||||||||||
| SATCAT nr. | 35315 | ||||||||||||||||
| Internet side | lunar |
||||||||||||||||
| Missions varighed | |||||||||||||||||
| Rumfartøjs egenskaber | |||||||||||||||||
| Fabrikant | NASA / GSFC | ||||||||||||||||
| Start masse | 1.916 kg (4.224 lb) | ||||||||||||||||
| Tør masse | 1.018 kg (2.244 lb) | ||||||||||||||||
| Nyttelastmasse | 92,6 kg (204 lb) | ||||||||||||||||
| Dimensioner | Lancering: 390 × 270 × 260 cm (152 × 108 × 103 in) | ||||||||||||||||
| Strøm | 1850 W | ||||||||||||||||
| Missionens start | |||||||||||||||||
| Frokost aftale | 18. juni 2009, 21:32:00 UTC | ||||||||||||||||
| Raket | Atlas V 401 | ||||||||||||||||
| Lancering site | Cape Canaveral SLC-41 | ||||||||||||||||
| Entreprenør | United Launch Alliance | ||||||||||||||||
| Indtastet service | 15. september 2009 | ||||||||||||||||
| Orbitale parametre | |||||||||||||||||
| Referencesystem | Selenocentrisk | ||||||||||||||||
| Halv-større akse | 1.825 km (1.134 mi) | ||||||||||||||||
| Periselene højde | 20 km (12 mi) | ||||||||||||||||
| Aposelene højde | 165 km (103 mi) | ||||||||||||||||
| Epoke | 4. maj 2015 | ||||||||||||||||
| Månens kredsløb | |||||||||||||||||
| Orbital indsættelse | 23. juni 2009 | ||||||||||||||||
| |||||||||||||||||
|
| |||||||||||||||||
Den Lunar Reconnaissance Orbiter ( LRO ) er en NASA robot rumfartøj øjeblikket kredsløb om Månen i en excentrisk polær kortlægning kredsløb . Data indsamlet af LRO er blevet beskrevet som afgørende for at planlægge NASAs fremtidige menneskelige og robotiske missioner til Månen. Dets detaljerede kortlægningsprogram identificerer sikre landingssteder, lokaliserer potentielle ressourcer på Månen, karakteriserer strålingsmiljøet og demonstrerer nye teknologier.
LRO blev lanceret den 18. juni 2009 i forbindelse med Lunar Crater Observation and Sensing Satellite (LCROSS) som forgængeren for NASAs Lunar Precursor Robotic Program og var den første amerikanske mission til Månen i over ti år. LRO og LCROSS blev lanceret som en del af USA's Vision for Space Exploration -program.
Sonden har lavet et 3D-kort over Månens overflade ved 100 meters opløsning og 98,2% dækning (eksklusive polarområder i dyb skygge), herunder billeder på 0,5 meter opløsning af Apollo-landingssteder. De første billeder fra LRO blev offentliggjort den 2. juli 2009, der viser en region i månens højland syd for Mare Nubium ( Skyernes hav ).
De samlede omkostninger ved missionen rapporteres til US $ 583 millioner, hvoraf $ 504 millioner vedrører den vigtigste LRO -sonde og $ 79 millioner til LCROSS -satellitten. Fra og med 2019 har LRO brændstof nok til at fortsætte driften i mindst syv år mere, og NASA forventer at fortsætte med at udnytte LROs rekognoseringskapacitet til at identificere steder for månelandere langt ind i 2020'erne.
Mission
_launches_with_LRO_and_LCROSS.jpg)
LRO er udviklet på NASAs Goddard Space Flight Center og er et stort (1.916 kg/4.224 lb) og sofistikeret rumfartøj. Dens missionsvarighed var planlagt til et år, men er siden blevet forlænget adskillige gange efter gennemgang af NASA.
Efter at have afsluttet en foreløbig designgennemgang i februar 2006 og en kritisk designgennemgang i november 2006, blev LRO sendt fra Goddard til Cape Canaveral Air Force Station den 11. februar 2009. Lancering var planlagt til oktober 2008, men denne gled til april som rumfartøj undergik test i et termisk vakuumkammer. Lanceringen blev planlagt til den 17. juni 2009 på grund af forsinkelsen i en prioriteret militær opsendelse og skete en dag senere, den 18. juni. Forsinkelsen på en dag skulle give rumfærgen Endeavour en chance for at løfte af sted til mission STS- 127 efter en brintbrændstoflækage, der annullerede en tidligere planlagt lancering.
Undersøgelsesområder omfatter selenodetisk global topografi ; månens polare områder , herunder mulige vandispartikler indskud og belysning miljø; karakterisering af dyb rumstråling i månens kredsløb; og kortlægning i høj opløsning med en maksimal opløsning på 50 cm/pixel (20 tommer/pixel) for at hjælpe med valg og karakterisering af fremtidige landingssteder.
Derudover har LRO leveret billeder og præcise placeringer af landere og udstyr fra tidligere amerikanske og russiske månemissioner, herunder Apollo -stederne.
Nyttelast

Orbiteren bærer et komplement af seks instrumenter og en teknologisk demonstration:
- Cosmic Ray Telescope for the Effects of Radiation (CRaTER)
- Det primære mål for Cosmic Ray Telescope for the Effects of Radiation er at karakterisere det globale månestrålingsmiljø og dets biologiske virkninger.
- Diviner
- Diviner Lunar Radiometer Experiment måler termisk emission af månens overflade for at give information om fremtidige overfladeoperationer og udforskning.
- Lyman-Alpha Mapping Project (LAMP)
- Lyman-Alpha Mapping Project kigger ind i permanent skyggede kratere på jagt efter vandis ved hjælp af ultraviolet lys genereret af stjerner samt brintatomer, der spredes tyndt i hele solsystemet .
- Lunar Exploration Neutron Detector (LEND)
- Lunar Exploration Neutron Detector leverer målinger, opretter kort og detekterer mulige isoverflader nær overfladevand.
- Lunar Orbiter Laser Altimeter (LOLA)
- Lunar Orbiter Laser Altimeter undersøgelsen giver en præcis global månetopografisk model og geodetisk gitter.
- Lunar Reconnaissance Orbiter Camera (LROC)
- Lunar Reconnaissance Orbiter Camera adresserer målekravene for landingsstedets certificering og polar belysning. LROC består af et par smalvinklede billedkameraer (NAC) og et enkelt vidvinkelkamera (WAC). LROC har fløjet flere gange i løbet af de historiske Apollo månelanding sites ved 50 km (31 mi) højde; med kameraets høje opløsning er Lunar Roving Vehicles og Lunar Module nedstigningsstadier og deres respektive skygger tydeligt synlige sammen med andet udstyr, der tidligere var tilbage på månen . Missionen returnerer cirka 70-100 terabyte billeddata. Det forventes, at denne fotografering vil øge den offentlige anerkendelse af landingenes gyldighed og yderligere miskreditere Apollo -konspirationsteorier .
- Mini-RF
- Miniatyrradiofrekvensradaren demonstrerede nye lette SAR- og kommunikationsteknologier og lokaliserede potentiel vand-is.
Navne til månen
Før LROs lancering gav NASA offentligheden mulighed for at få deres navne placeret i en mikrochip på LRO. Fristen for denne mulighed var 31. juli 2008. Omkring 1,6 millioner navne blev indsendt.
Missionsfremgang



Den 23. juni 2009 trådte Lunar Reconnaissance Orbiter i kredsløb om Månen efter en fire-og-en-halv dags rejse fra Jorden. Da det blev lanceret, var rumfartøjet rettet mod et punkt foran Månens position. En midtvejskorrektion var påkrævet under turen, for at rumfartøjet kunne komme korrekt ind i månens kredsløb. Da rumfartøjet nåede den yderste side af Månen , blev dets raketmotor affyret, så det kunne fanges af Månens tyngdekraft ind i en elliptisk månebane. En serie på fire raketforbrændinger i løbet af de næste fire dage satte satellitten i sin idriftsættelsesfase, hvor hvert instrument blev bragt online og testet. Den 15. september 2009 startede rumfartøjet sin primære mission ved at kredser om månen på omkring 50 km (31 mi) i et år. Efter at have afsluttet sin etårige udforskningsfase, i september 2010, blev LRO overdraget til NASA's Science Mission Directorate for at fortsætte missionens videnskabelige fase. Det ville fortsætte i sin 50 km cirkulære bane, men til sidst ville det blive overgået til en brændstofbesparende elliptisk bane for resten af missionen.
NASAs LCROSS -mission kulminerede med to månens påvirkninger kl. 11:31 og 11:36 UTC den 9. oktober. Målet med påvirkningen var søgning efter vand i Cabeus -krateret nær Månens sydpol, og foreløbige resultater indikerede tilstedeværelsen af begge vand og hydroxyl , en ion relateret til vand.
Den 4. januar 2011 fandt Mini-RF- instrumentteamet for Lunar Reconnaissance Orbiter (LRO) ud af, at Mini-RF-radarsenderen havde lidt en anomali. Mini-RF har suspenderet normal drift. På trods af at det ikke er i stand til at sende, bruges instrumentet til at indsamle bistatiske radarobservationer ved hjælp af radartransmissioner fra Jorden. Mini-RF-instrumentet har allerede opfyldt sine videnskabelige missionskriterier ved at indsamle mere end 400 strimler radardata siden september 2010.
I januar 2013 testede NASA envejs laserkommunikation med LRO ved at sende et billede af Mona Lisa til Lunar Orbiter Laser Altimeter (LOLA) instrument på LRO fra Next Generation Satellite Laser Ranging (NGSLR) station på NASAs Goddard Space Flight Center i Greenbelt, Md.
I maj 2015 blev LRO's bane ændret til at flyve 20 km (12 mi) over Månens sydpol, så data fra højere opløsning kan hentes fra Lunar Orbiter Laser Altimeter (LOLA) og Diviner -instrumenter over de permanent skyggede kratere der.
I 2019 fandt LRO styrtstedet for den indiske månelander Vikram .
I 2020 blev software testet til at bruge stjernesporere i stedet for Miniature Inertial Measurement Unit, der var blevet slukket i 2018 (da det var nedværdigende).
Resultater

Den 21. august 2009 forsøgte rumfartøjet sammen med Chandrayaan-1 orbiteren at udføre et bistatisk radareksperiment for at opdage tilstedeværelsen af vandis på månens overflade, men testen mislykkedes.
Den 17. december 2010 blev et topografisk kort over Månen baseret på data indsamlet af LOLA -instrumentet frigivet til offentligheden. Dette er det mest nøjagtige topografiske kort over Månen til dato. Det vil fortsat blive opdateret, efterhånden som der indsamles flere data.
Den 15. marts 2011 blev det sidste sæt data fra missionens udforskningsfase frigivet til NASA Planetary Data System . Rumfartøjets syv instrumenter leverede mere end 192 terabyte data. LRO har allerede indsamlet lige så mange data som alle andre planetariske missioner tilsammen. Denne mængde data er mulig, fordi månen er så tæt, og fordi LRO har sin egen dedikerede jordstation og ikke behøver at dele tid på Deep Space Network . Blandt de nyeste produkter er et globalt kort med en opløsning på 100 m/pixel (330 ft/pixel) fra Lunar Reconnaissance Orbiter Camera (LROC).
I marts 2015 rapporterede LROC -teamet at have afbildet placeringen af en påvirkning, hvis blitz blev observeret fra Jorden den 17. marts 2013. Holdet fandt krateret ved at gå tilbage til billeder taget i det første år eller to og sammenligne dem med billeder taget efter påvirkningen, kaldet tidsmæssige par. Billederne afslørede stænk, små områder, hvis refleksion er markant forskellig fra det omgivende terræn, formentlig som følge af forstyrrelse af overfladen ved nylige påvirkninger.
I september 2015 havde LROC afbildet næsten tre fjerdedele af månens overflade ved høj opløsning, hvilket afslørede mere end 3.000 fligede skarpe . Deres globale fordeling og orientering tyder på, at fejlene skabes, når månen krymper, med indflydelse fra gravitations -tidevandskræfter fra Jorden.
I marts 2016 rapporterede LROC -teamet brugen af 14.092 NAC -tidspar til at opdage over 47.000 nye pletter på månen.
Missionen fører en komplet liste over publikationer med videnskabelige resultater på sit websted.
Galleri
- Lunar Reconnaissance Orbiter mission fotos

Første LRO -billede (30. juni 2009)

Apollo 11 landingsplads
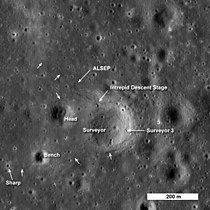
Apollo 12 og landmåler 3 landingsplads
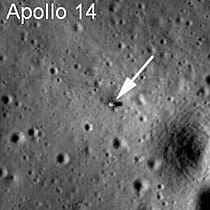
Apollo 14 landingssted

Apollo 15 landingsplads

Apollo 16 landingsplads

Apollo 17 landingsplads

Nærbillede af Apollo 17 Challenger nedstigningsetape

Landmåler 1 landingsplads
LRO ser LADEE i en afstand af 9 km (5,6 mi)

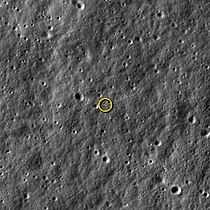
Chang'e 4 landingssted

LRO udsigt over uregelmæssig hoppe , et ekstremt ungt terræn

Jordopgang over Compton -krateret















.jpg)


Se også
Referencer
eksterne links
- Lunar Reconnaissance Orbiter -websted af NASA
- Lunar Reconnaissance Orbiter -websted af NASAs Goddard Space Flight Center
- Lunar Reconnaissance Orbiter missionsprofil ved NASAs undersøgelse af solsystemet
- Diviner Instruments websted af UCLA
- LROC Instruments websted ved Arizona State University
- LROC Web Map Service af Arizona State University
- Album med billeder og videoer i høj opløsning med overflyvning af Seán Doran, baseret på LROC-data, på Flickr og YouTube