I matematik , ortogonale koordinater defineres som et sæt d koordinater q = ( q 1 , q 2 , ..., q d ), hvori koordinere overflader alle mødes vinkelret (note: hævet skrift er indekser , ikke eksponenter). En koordinatoverflade for en bestemt koordinat q k er kurven, overfladen eller overfladen, hvor q k er en konstant. For eksempel er de tredimensionelle kartesiske koordinater ( x , y , z ) et ortogonalt koordinatsystem, da dets koordinatflader x = konstant, y = konstant og z = konstant er planer, der mødes i rette vinkler til hinanden, dvs. , er vinkelret. Ortogonale koordinater er et særligt, men ekstremt almindeligt tilfælde af krumme linier .
Motivering
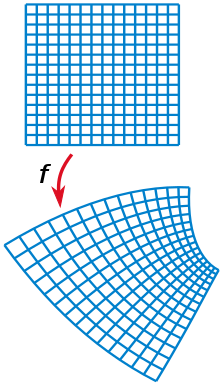
Et
konformt kort, der virker på et rektangulært gitter. Bemærk, at orthogonaliteten af det buede gitter bevares.
Mens vektoroperationer og fysiske love normalt er lettest at udlede i kartesiske koordinater , bruges ikke-kartesiske ortogonale koordinater ofte i stedet til løsning af forskellige problemer, især grænseværdiproblemer , såsom dem, der opstår i feltteorier om kvantemekanik , væskestrøm , elektrodynamik , plasmafysik og diffusion af kemiske arter eller varme .
Den største fordel ved ikke-kartesiske koordinater er, at de kan vælges til at matche problemets symmetri. For eksempel afhænger trykbølgen på grund af en eksplosion langt fra jorden (eller andre barrierer) af 3D-rum i kartesiske koordinater, men trykket bevæger sig overvejende væk fra midten, så problemet i sfæriske koordinater bliver meget næsten endimensionalt (da trykbølgen dominerende kun afhænger af tid og afstanden fra midten). Et andet eksempel er (langsom) væske i et lige cirkulært rør: I kartesiske koordinater skal man løse et (vanskeligt) todimensionelt grænseværdiproblem, der involverer en delvis differentialligning, men i cylindriske koordinater bliver problemet endimensionalt med en almindelig differential ligning i stedet for en delvis differentialligning .
Grunden til at foretrække ortogonale koordinater i stedet for generelle krumme linier er enkelhed: mange komplikationer opstår, når koordinater ikke er ortogonale. For eksempel i ortogonale koordinater kan mange problemer løses ved adskillelse af variabler . Adskillelse af variabler er en matematisk teknik, der konverterer et komplekst d -dimensionelt problem til d endimensionelle problemer, der kan løses i form af kendte funktioner. Mange ligninger kan reduceres til Laplaces ligning eller Helmholtz -ligningen . Laplaces ligning kan adskilles i 13 ortogonale koordinatsystemer (de 14 anført i nedenstående tabel med undtagelse af toroidal ), og Helmholtz -ligningen kan adskilles i 11 ortogonale koordinatsystemer.
Ortogonale koordinater har aldrig off-diagonale termer i deres metriske tensor . Med andre ord kan den infinitesimale kvadrerede afstand ds 2 altid skrives som en skaleret sum af de kvadrerede infinitesimale koordinatforskydninger

hvor d er dimensionen og skaleringsfunktionerne (eller skalafaktorer)

lig med kvadratrødderne af de diagonale komponenter i den metriske tensor eller længderne af de lokale basisvektorer beskrevet nedenfor. Disse skaleringsfunktioner h i bruges til at beregne differentialoperatorer i de nye koordinater, f.eks. Gradienten , Laplacian , divergensen og krøllen .

En enkel metode til at generere ortogonale koordinatsystemer i to dimensioner er ved en konform kortlægning af et standard todimensionalt gitter af kartesiske koordinater ( x , y ) . Et komplekst tal z = x + iy kan dannes ud fra de reelle koordinater x og y , hvor i repræsenterer den imaginære enhed . Enhver holomorf funktion w = f ( z ) med ikke-nul kompleks derivat vil frembringe en konform mapping ; hvis det resulterende komplekse tal skrives w = u + iv , skærer kurverne for konstant u og v sig i rette vinkler, ligesom de originale linjer med konstant x og y gjorde.
Ortogonale koordinater i tre og højere dimensioner kan genereres fra et ortogonalt todimensionalt koordinatsystem, enten ved at projicere det i en ny dimension ( cylindriske koordinater ) eller ved at rotere det todimensionale system omkring en af dets symmetriakser. Der er imidlertid andre ortogonale koordinatsystemer i tre dimensioner, der ikke kan opnås ved at projicere eller rotere et todimensionalt system, såsom ellipsoide koordinater . Mere generelle ortogonale koordinater kan opnås ved at starte med nogle nødvendige koordinatoverflader og overveje deres ortogonale baner .
Basisvektorer
Kovariant grundlag
I kartesiske koordinater er basisvektorerne faste (konstante). I den mere generelle indstilling af krumme lineære koordinater er et punkt i rummet specificeret af koordinaterne, og ved hvert sådant punkt er der bundne et sæt basisvektorer, som generelt ikke er konstante: dette er essensen af krumme lineære koordinater generelt og er et meget vigtigt begreb. Hvad der adskiller ortogonale koordinater er, at selvom basisvektorerne varierer, er de altid ortogonale i forhold til hinanden. Med andre ord,

Disse basisvektorer er pr. Definition tangentvektorerne for kurverne opnået ved at variere en koordinat og holde de andre faste:

Visualisering af 2D ortogonale koordinater. Kurver opnået ved at holde alle undtagen én koordinatkonstant vises sammen med basisvektorer. Bemærk, at basisvektorerne ikke er lige lange: de behøver ikke at være, de skal kun være ortogonale.

hvor r er et punkt, og q i er den koordinat, som basisvektoren ekstraheres for. Med andre ord opnås en kurve ved at fastsætte alle på nær én koordinat; den ufiksede koordinat varieres som i en parametrisk kurve , og afledningen af kurven i forhold til parameteren (den varierende koordinat) er basisvektoren for den koordinat.
Bemærk, at vektorerne ikke nødvendigvis er lige lange. De nyttige funktioner kendt som skalafaktorer for koordinaterne er simpelthen længderne af basisvektorerne (se nedenstående tabel). Skalafaktorerne kaldes undertiden Lamé -koefficienter for ikke at forveksle med Lamé -parametre (solid mekanik) .


De normaliserede basisvektorer er noteret med en hat og opnås ved at dividere med længden:

Et vektorfelt kan specificeres af dets komponenter med hensyn til basisvektorerne eller de normaliserede basisvektorer, og man skal være sikker på, hvilket tilfælde der menes. Komponenter i det normaliserede grundlag er mest almindelige i ansøgninger om klarhed af mængderne (for eksempel vil man måske håndtere tangentialhastighed i stedet for tangentialhastighed gange en skalafaktor); i afledninger er det normaliserede grundlag mindre almindeligt, da det er mere kompliceret.
Modstridende grundlag
Basisvektorerne vist ovenfor er kovariante basisvektorer (fordi de "co-varierer" med vektorer). I tilfælde af ortogonale koordinater er de kontravariant basisvektorer lette at finde, da de vil være i samme retning som de kovariante vektorer, men gensidige længde (af denne grund siges de to sæt basisvektorer at være gensidige i forhold til hver Andet):

dette følger af, at man pr. definition anvender Kronecker -deltaet . Noter det:


Vi står nu over for tre forskellige basissæt, der sædvanligvis bruges til at beskrive vektorer i ortogonale koordinater: kovariansbasis e i , kontravariantbasis e i og normaliseret basis ê i . Mens en vektor er en objektiv størrelse , hvilket betyder, at dens identitet er uafhængig af ethvert koordinatsystem, afhænger en vektors komponenter af, på hvilket grundlag vektoren er repræsenteret i.
For at undgå forvirring repræsenteres komponenterne i vektoren x med hensyn til e i -grundlaget som x i , mens komponenterne med hensyn til e i -basis er repræsenteret som x i :

Indeksernes position repræsenterer, hvordan komponenterne beregnes (øvre indekser må ikke forveksles med eksponentiering ). Bemærk, at summeringssymbolerne Σ (stor Sigma ) og summeringsområdet, der angiver summering over alle basisvektorer ( i = 1, 2, ..., d ), ofte udelades . Komponenterne er simpelthen relateret af:

Der er ingen forskel på udbredt notation ved anvendelse af vektorkomponenter med hensyn til det normaliserede grundlag; i denne artikel vil vi bruge abonnementer til vektorkomponenter og bemærke, at komponenterne beregnes på normaliseret grundlag.
Vektor algebra
Vektortilsætning og -negation udføres komponentmæssigt ligesom i kartesiske koordinater uden komplikationer. Ekstra overvejelser kan være nødvendige for andre vektoroperationer.
Bemærk dog, at alle disse operationer antager, at to vektorer i et vektorfelt er bundet til det samme punkt (med andre ord, halerne af vektorer falder sammen). Da basisvektorer generelt varierer i ortogonale koordinater, kræver to overvejelser, hvis to vektorer tilføjes, hvis komponenter beregnes på forskellige punkter i rummet.
Prikprodukt
Den dot produkt i kartesiske koordinater ( euklidisk rum med en ortonormal basis sæt) er simpelthen summen af produkterne af komponenterne. I ortogonale koordinater får prikproduktet af to vektorer x og y denne velkendte form, når komponenterne i vektorer beregnes på normaliseret grundlag:

Dette er en umiddelbar konsekvens af det faktum, at det normaliserede grundlag på et tidspunkt kan danne et kartesisk koordinatsystem: det fastsatte grundlag er ortonormalt .
For komponenter i de kovariante eller kontravariantbaser,

Dette kan let udledes ved at skrive vektorerne ud i komponentform, normalisere basisvektorerne og tage prikproduktet. For eksempel i 2D:
![{\ begin {align} {\ mathbf x} \ cdot {\ mathbf y} & = \ left (x^{1} {\ mathbf e} _ {1}+x^{2} {\ mathbf e} _ { 2} \ højre) \ cdot \ venstre (y_ {1} {\ mathbf e}^{1}+y_ {2} {\ mathbf e}^{2} \ højre) \\ [10pt] & = \ venstre ( x^{1} h_ {1} {\ hat {{\ mathbf e}}} _ {1}+x^{2} h_ {2} {\ hat {{\ mathbf e}}} _ {2} \ højre) \ cdot \ venstre (y_ {1} {\ frac {{\ hat {{\ mathbf e}}}^{1}} {h_ {1}}}+y_ {2} {\ frac {{\ hat {{\ mathbf e}}}^{2}} {h_ {2}}} \ right) = x^{1} y_ {1}+x^{2} y_ {2} \ end {align}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b967298ef8aa5d1b20f98c99698d74ed639bbcae)
hvor det faktum, at de normaliserede kovariante og kontravariantbaser er ens, er blevet brugt.
Kryds produkt
Det kryds produkt i 3D kartesiske koordinater er:

Ovenstående formel forbliver derefter gyldig i ortogonale koordinater, hvis komponenterne beregnes på det normaliserede grundlag.
For at konstruere krydsproduktet i ortogonale koordinater med kovariante eller kontravariantbaser skal vi igen simpelthen normalisere basisvektorerne, for eksempel:

som, skriftligt udvidet,

Kortfattet notation for krydsproduktet, som forenkler generalisering til ikke-ortogonale koordinater og højere dimensioner, er mulig med Levi-Civita tensor , som vil have andre komponenter end nuller og en, hvis skalafaktorerne ikke alle er ens.
Vektorberegning
Differentiering
Når man ser på en uendelig forskydning fra et tidspunkt, er det tydeligt, at

Per definition skal gradient af en funktion tilfredsstille (denne definition forbliver sand, hvis ƒ er en tensor )

Det følger derefter, at deloperatøren skal være:

og dette sker tilfældigt i generelle krumme linier. Mængder som gradienten og Laplacian følger ved korrekt anvendelse af denne operatør.
Grundlæggende vektorformler
Fra d r og normaliserede basisvektorer ê i kan følgende konstrueres.
| Differentialelement
|
Vektorer
|
Skalarer
|
|
Linjeelement
|
Tangentvektor til koordinering af kurve q i :

|
Uendelig længde

|
|
Overfladeelement
|
Normal for at koordinere overflade q k = konstant:

|
Uendelig overflade

|
|
Volumenelement
|
Ikke relevant
|
Uendelig lille volumen

|
hvor

er den jakobiske determinant , som har den geometriske fortolkning af deformationen i volumen fra den uendelige kube d x d y d z til den uendelige buede volumen i de ortogonale koordinater.
Integration
Ved hjælp af linieelementet vist ovenfor er linieintegralet langs en sti for en vektor F :


Et uendeligt minimalt arealelement for en overflade beskrevet ved at holde en koordinat q k konstant er:

På samme måde er volumenelementet:

hvor det store symbol Π (hovedstaden Pi ) angiver et produkt på samme måde som et stort Σ angiver summering. Bemærk, at produktet af alle skalafaktorer er den jakobiske determinant .
Som et eksempel er overfladeintegralen af en vektorfunktion F over en q 1 = konstant overflade i 3D:


Bemærk, at F 1 / h 1 er komponenten af F normal til overfladen.
Differentielle operatører i tre dimensioner
Da disse operationer er almindelige i anvendelse, er alle vektorkomponenterne i dette afsnit præsenteres i forhold til det normaliserede grundlag: .

| Operatør
|
Udtryk
|
|
Gradient af et skalarfelt
|

|
|
Divergens af et vektorfelt
|
![\ nabla \ cdot {\ mathbf F} = {\ frac {1} {h_ {1} h_ {2} h_ {3}}} \ venstre [{\ frac {\ partial} {\ delvis q^{1}} } \ venstre (F_ {1} h_ {2} h_ {3} \ højre)+{\ frac {\ partial} {\ delvis q^{2}}} \ venstre (F_ {2} h_ {3} h_ { 1} \ højre)+{\ frac {\ partial} {\ delvis q^{3}}} \ venstre (F_ {3} h_ {1} h_ {2} \ højre) \ højre]](https://wikimedia.org/api/rest_v1/media/math/render/svg/507074e0312d74f218fab31eb2c8b8f5b1f4c006)
|
|
Krølle af et vektorfelt
|
![{\ begin {align} \ nabla \ times {\ mathbf F} & = {\ frac {{\ hat {{\ mathbf e}}} _ {1}} {h_ {2} h_ {3}}} \ venstre [{\ frac {\ partial} {\ delvis q^{2}}} \ venstre (h_ {3} F_ {3} \ højre)-{\ frac {\ partial} {\ delvis q^{3}}} \ venstre (h_ {2} F_ {2} \ højre) \ højre]+{\ frac {{\ hat {{\ mathbf e}}} _ {2}} {h_ {3} h_ {1}}} \ venstre [{\ frac {\ partial} {\ delvis q^{3}}} \ venstre (h_ {1} F_ {1} \ højre)-{\ frac {\ partial} {\ delvis q^{1}} } \ venstre (h_ {3} F_ {3} \ højre) \ højre] \\ [10pt] &+{\ frac {{\ hat {{\ mathbf e}}} _ {3}} {h_ {1} h_ {2}}} \ venstre [{\ frac {\ partial} {\ delvis q^{1}}} \ venstre (h_ {2} F_ {2} \ højre)-{\ frac {\ partial} {\ delvis q^{2}}} \ venstre (h_ {1} F_ {1} \ højre) \ højre] = {\ frac {1} {h_ {1} h_ {2} h_ {3}}} {\ begin {vmatrix} h_ {1} {\ hat {{\ mathbf {e}}}} _ {1} og h_ {2} {\ hat {{\ mathbf {e}}}} _ {2} og h_ {3} { \ hat {{\ mathbf {e}}}} _ {3} \\ {\ dfrac {\ parti} {\ delvis q^{1}}} og {\ dfrac {\ delvis} {\ delvis q^{2 }}} & {\ dfrac {\ partial} {\ delvis q^{3}}} \\ h_ {1} F_ {1} & h_ {2} F_ {2} & h_ {3} F_ {3} \ end { vmatrix}} \ end {align}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6f0cf253355fd6c635882210ba8aea0ce0a2ed69)
|
|
Laplacian af et skalarfelt
|
![\ nabla ^{2} \ phi = {\ frac {1} {h_ {1} h_ {2} h_ {3}}} \ venstre [{\ frac {\ partial} {\ delvis q ^{1}}} \ venstre ({\ frac {h_ {2} h_ {3}} {h_ {1}}} {\ frac {\ delvis \ phi} {\ delvis q^{1}}} \ højre)+{\ frac { \ delvis} {\ delvis q^{2}}} \ venstre ({\ frac {h_ {3} h_ {1}} {h_ {2}}} {\ frac {\ delvis \ phi} {\ delvis q^ {2}}} \ højre)+{\ frac {\ partial} {\ delvis q^{3}}} \ venstre ({\ frac {h_ {1} h_ {2}} {h_ {3}}} { \ frac {\ delvis \ phi} {\ delvis q^{3}}} \ højre) \ højre]](https://wikimedia.org/api/rest_v1/media/math/render/svg/c36a46d097a001f5efcd7baeb71a704a4b7d12a7)
|
Ovenstående udtryk kan skrives i en mere kompakt form ved hjælp af Levi-Civita-symbolet og den jakobiske determinant under forudsætning af summering over gentagne indeks:


| Operatør
|
Udtryk
|
|
Gradient af et skalarfelt
|

|
|
Divergens af et vektorfelt
|

|
|
Krølning af et vektorfelt (kun 3D)
|

|
|
Laplacian af et skalarfelt
|

|
Bemærk også, at gradienten af et skalarfelt kan udtrykkes i form af den jakobiske matrix J, der indeholder kanoniske partielle derivater:
![{\ displaystyle \ mathbf {J} = \ venstre [{\ frac {\ partiel \ phi} {\ delvis q^{1}}}, {\ frac {\ delvis \ phi} {\ delvis q^{2}} }, {\ frac {\ partiel \ phi} {\ delvis q^{3}}} \ højre]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2b3d1780fdf3a08972f06460f5741be18d7bd6fe)
ved ændring af grundlaget :

hvor rotations- og skaleringsmatricerne er:
![{\ displaystyle \ mathbf {R} = [\ mathbf {e} _ {1}, \ mathbf {e} _ {2}, \ mathbf {e} _ {3}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/28fd2e72b24c18b1b2b140ee915554865ec5c6a5)
![{\ displaystyle \ mathbf {S} = \ mathrm {diag} ([h_ {1}^{-1}, h_ {2}^{-1}, h_ {3}^{-1}]).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/974cf3b8344f1c1effd1f000b64a2ac21b104055)
Tabel over ortogonale koordinater
Udover de sædvanlige kartesiske koordinater er flere andre vist nedenfor. Intervalnotation bruges til kompakthed i koordinatsøjlen.
| Curvillineære koordinater ( q 1 , q 2 , q 3 )
|
Transformation fra kartesisk ( x , y , z )
|
Skalafaktorer
|
|
Sfæriske polære koordinater
![(r, \ theta, \ phi) \ in [0, \ infty) \ times [0, \ pi] \ times [0,2 \ pi)](https://wikimedia.org/api/rest_v1/media/math/render/svg/05f80374da8b4cc0a2a38db8d858474b585b0574)
|

|

|
|
Cylindriske polære koordinater

|

|

|
|
Parabolske cylindriske koordinater

|

|

|
|
Paraboliske koordinater

|

|

|
|
Paraboloidale koordinater

|

hvor

|

|
|
Ellipsoide koordinater

|

hvor
|

|
|
Elliptiske cylindriske koordinater

|

|

|
|
Prolat kugleformede koordinater
![(\ xi, \ eta, \ phi) \ i [0, \ infty) \ gange [0, \ pi] \ gange [0,2 \ pi)](https://wikimedia.org/api/rest_v1/media/math/render/svg/58c343b31aeed0f8843151e697f796a225a14491)
|

|

|
|
Oblerede kugleformede koordinater
![(\ xi, \ eta, \ phi) \ i [0, \ infty) \ gange \ venstre [-{\ frac {\ pi} {2}}, {\ frac {\ pi} {2}} \ højre] \ gange [0,2 \ pi)](https://wikimedia.org/api/rest_v1/media/math/render/svg/93628d06c8efe1c6f60365cc5f80f615c07bca13)
|

|

|
|
Bipolare cylindriske koordinater

|

|

|
|
Toroidale koordinater
![(u, v, \ phi) \ in (-\ pi, \ pi] \ times [0, \ infty) \ times [0,2 \ pi)](https://wikimedia.org/api/rest_v1/media/math/render/svg/000c3d0efd5294a2c0d125ea8f4a1052147fc971)
|

|

|
|
Kugleformede koordinater
|

|

|
|
Koniske koordinater

|

|

|
Se også
Noter
Referencer
- Korn GA og Korn TM . (1961) Matematisk håndbog for forskere og ingeniører , McGraw-Hill, s. 164–182.
-
Morse og Feshbach (1953). "Metoder til teoretisk fysik, bind 1". McGraw-Hill.
- Margenau H. og Murphy GM. (1956) Matematik for fysik og kemi , 2.. red., Van Nostrand, s. 172–192.
- Leonid P. Lebedev og Michael J. Cloud (2003) Tensoranalyse , s. 81 - 88.


