I kontrolteknik er en tilstands-rumrepræsentation en matematisk model for et fysisk system som et sæt input-, output- og tilstandsvariabler, der er relateret til første ordens differentialligninger eller differensligninger . Statlige variabler er variabler, hvis værdier udvikler sig over tid på en måde, der afhænger af de værdier, de har til enhver tid, og af de eksternt pålagte værdier af inputvariabler. Outputvariablernes værdier afhænger af værdierne for tilstandsvariablerne.
" Tilstandsrummet " er det euklidiske rum , hvor variablerne på akserne er tilstandsvariablerne. Systemets tilstand kan repræsenteres som en tilstandsvektor inden for dette rum. For at abstrahere fra antallet af input, output og stater udtrykkes disse variabler som vektorer .
Hvis det dynamiske system er lineært, tids-invariant og endelig-dimensionelt, kan differentialligninger og algebraiske ligninger skrives i matrixform . State-space-metoden er kendetegnet ved betydelig algebraisering af generel systemteori , hvilket gør det muligt at bruge Kronecker-vektormatrixstrukturer. Kapaciteten af disse strukturer kan effektivt anvendes til forskningssystemer med modulering eller uden den. Stat-plads-repræsentationen (også kendt som " tidsdomænetilgang ") giver en praktisk og kompakt måde at modellere og analysere systemer med flere ind- og udgange. Med input og output er vi ellers nødt til at nedskrive Laplace-transformer for at kode al informationen om et system. I modsætning til frekvensdomænetilgangen er brugen af repræsentationen af tilstand-rum ikke begrænset til systemer med lineære komponenter og nul startbetingelser.



Stat-rum-modellen kan anvendes i emner som økonomi, statistik, datalogi og elektroteknik og neurovidenskab. I økonometri kan statsrumsmodeller for eksempel bruges til at nedbryde en tidsserie i trend og cyklus, komponere individuelle indikatorer til et sammensat indeks, identificere vendepunkter i konjunkturcyklussen og estimere BNP ved hjælp af latente og ikke-observerede tidsserier. Mange applikationer er afhængige af Kalman-filteret for at producere skøn over de aktuelle ukendte tilstandsvariabler ved hjælp af deres tidligere observationer.
Angiv variabler
De interne tilstandsvariabler er den mindst mulige delmængde af systemvariabler, der kan repræsentere hele systemets tilstand til enhver tid. Det mindste antal tilstandsvariabler, der kræves for at repræsentere et givet system, er normalt lig med rækkefølgen af systemets definerende differentialligning, men ikke nødvendigvis. Hvis systemet er repræsenteret i form af overføringsfunktion, er det mindste antal tilstandsvariabler lig med rækkefølgen af overførselsfunktionens nævneren, efter at den er blevet reduceret til en ordentlig brøkdel. Det er vigtigt at forstå, at konvertering af en tilstandsrumsrealisering til en overføringsfunktionsformular kan miste nogle interne oplysninger om systemet og kan give en beskrivelse af et system, der er stabilt, når realiseringen af tilstandsrummet er ustabil på bestemte punkter. I elektriske kredsløb er antallet af tilstandsvariabler ofte, men ikke altid, det samme som antallet af energilagringselementer i kredsløbet, såsom kondensatorer og induktorer . De definerede tilstandsvariabler skal være lineært uafhængige, dvs. ingen tilstandsvariabler kan skrives som en lineær kombination af de andre tilstandsvariabler, ellers kan systemet ikke løses.

Lineære systemer
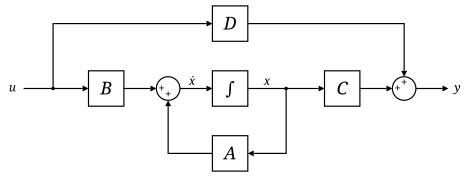
Blokdiagramrepræsentation af de lineære tilstand-rumligninger
Den mest generelle tilstand-rum repræsentation af et lineært system med input, output og state variabler er skrevet i følgende form:


hvor:
-
 kaldes "tilstandsvektoren" ,;
kaldes "tilstandsvektoren" ,;
-
 kaldes "outputvektor" ,;
kaldes "outputvektor" ,;
-
 kaldes "input (eller kontrol) vektoren" ;
kaldes "input (eller kontrol) vektoren" ;
-
 er "tilstand (eller systemet) matrix", ,
er "tilstand (eller systemet) matrix", ,![{\ displaystyle \ dim [\ mathbf {A} (\ cdot)] = n \ gange n}](https://wikimedia.org/api/rest_v1/media/math/render/svg/36132ac686feb5a155148ce1af3c4b1cde26d963)
-
 er "inputmatrixen", ,
er "inputmatrixen", ,![{\ displaystyle \ dim [\ mathbf {B} (\ cdot)] = n \ gange p}](https://wikimedia.org/api/rest_v1/media/math/render/svg/399a639fe2c75cc2dc72e069fba832a235d70bca)
-
 er "output matrix", ,
er "output matrix", ,![{\ displaystyle \ dim [\ mathbf {C} (\ cdot)] = q \ gange n}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0f0734c77f3aaf2ece3c896f20be30bb971eed19)
-
 er "gennemføring (eller feedforward) matrix" (i tilfælde, hvor systemet modellen ikke har en direkte gennemføring, er matricen nul), ,
er "gennemføring (eller feedforward) matrix" (i tilfælde, hvor systemet modellen ikke har en direkte gennemføring, er matricen nul), ,![{\ displaystyle \ dim [\ mathbf {D} (\ cdot)] = q \ gange p}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5067c86df8b8b6881aa5adc6876fd9ee762cc088)
-
 .
.
I denne generelle formulering får alle matricer lov til at være tidsvariant (dvs. deres elementer kan afhænge af tid); i det almindelige LTI- tilfælde vil matricer dog være tidsubariante. Tidsvariablen kan være kontinuerlig (f.eks. ) Eller diskret (f.eks. ). I sidstnævnte tilfælde bruges tidsvariablen normalt i stedet for . Hybride systemer giver mulighed for tidsdomæner, der har både kontinuerlige og diskrete dele. Afhængigt af de antagelser, der er foretaget, kan repræsentationen af stat-rum-modellen antage følgende former:




| Systemtype |
Stat-rum-model
|
| Kontinuerlig tid-invariant |


|
| Kontinuerlig tidsvariant |
|
| Eksplicit diskret tids-invariant |


|
| Eksplicit diskret tidsvariant |


|
Laplace-domæne for
kontinuerlig tids-invariant |


|
Z-domæne af
diskret tids-invariant |


|
Eksempel: kontinuerlig LTI-sag
Stabilitet og naturlige responskarakteristika for et kontinuerligt LTI-system (dvs. lineær med matricer, der er konstante med hensyn til tid) kan studeres ud fra matrixens egenværdier . Stabiliteten af en tids-invariant stats-rum-model kan bestemmes ved at se på systemets overførselsfunktion i faktoriseret form. Det vil så se sådan ud:


Nævneren for overførselsfunktionen er lig med det karakteristiske polynom fundet ved at tage determinanten af ,


Rødderne til dette polynom ( egenværdierne ) er systemoverførselsfunktionens poler (dvs. singulariteterne, hvor overførselsfunktionens størrelse er ubegrænset). Disse poler kan bruges til at analysere, om systemet er asymptotisk stabilt eller marginalt stabilt . En alternativ tilgang til bestemmelse af stabilitet, som ikke involverer beregning af egenværdier, er at analysere systemets Lyapunov-stabilitet .
Nullerne, der findes i tælleren, kan ligeledes bruges til at bestemme, om systemet er minimumsfase .

Systemet er muligvis stadig input-output stabilt (se BIBO stabil ), selvom det ikke er internt stabilt. Dette kan være tilfældet, hvis ustabile poler annulleres af nuller (dvs. hvis disse singulariteter i overførselsfunktionen er aftagelige ).
Kontrollerbarhed
Tilstanden for kontrol af tilstand indebærer, at det ved hjælp af tilladte input er muligt at styre staterne fra enhver indledende værdi til en endelig værdi inden for et endeligt tidsvindue. En kontinuerlig tid-invariant lineær tilstand-rum-model kan kontrolleres, hvis og kun hvis

hvor rang er antallet af lineært uafhængige rækker i en matrix, og hvor n er antallet af tilstandsvariabler.
Observerbarhed
Observabilitet er et mål for, hvor godt interne tilstande i et system kan udledes af viden om dets eksterne output. Observabiliteten og kontrollerbarheden af et system er matematiske dualer (dvs. da styrbarhed tilvejebringer, at der er et input, der bringer enhver initialtilstand til en hvilken som helst ønsket sluttilstand, giver observabilitet, at kendskab til en outputbane giver tilstrækkelig information til at forudsige systemets starttilstand ).
En kontinuerlig tids-invariant lineær tilstand-rum-model kan observeres, hvis og kun hvis

Overførselsfunktion
" Overførselsfunktionen " for en kontinuerlig tidsinvariant lineær tilstands-rummodel kan udledes på følgende måde:
Først tager vi Laplace-transformationen af
udbytter

Dernæst forenkler vi for at give


og dermed

Erstatter for i outputligningen

giver

Under forudsætning af nul startbetingelser og et enkelt input-output (SISO) -system er overførselsfunktionen defineret som forholdet mellem output og input . For et MIMO-system (multiple input) er dette forhold dog ikke defineret. Under forudsætning af nul startbetingelser er overførselsfunktionsmatricen derfor afledt af



ved hjælp af metoden til at ligne de koefficienter, der giver
-
 .
.
Derfor er der en matrix med dimensionen, der indeholder overførselsfunktioner for hver input-outputkombination. På grund af enkelheden af denne matrixnotation bruges tilstand-rumrepræsentation almindeligvis til multiple-input, multiple-output-systemer. Den Rosenbrock systemet matrix tilvejebringer en bro mellem state-space repræsentation og dens overføringsfunktion .

Kanoniske realiseringer
Enhver given overførselsfunktion, der er strengt korrekt, kan let overføres til state-space ved hjælp af følgende tilgang (dette eksempel er for et 4-dimensionelt, single-input, single-output system):
Givet en overføringsfunktion skal du udvide den for at afsløre alle koefficienter i både tælleren og nævneren. Dette skal resultere i følgende form:

Koefficienterne kan nu indsættes direkte i state-space-modellen ved hjælp af følgende tilgang:


Denne tilstands-rumrealisering kaldes kontrollerbar kanonisk form, fordi den resulterende model garanteres at være kontrollerbar (dvs. fordi kontrollen kommer ind i en kæde af integratorer, har den evnen til at bevæge enhver tilstand).
Overførselsfunktionskoefficienterne kan også bruges til at konstruere en anden type kanonisk form


Denne realisering af tilstandsrum kaldes observerbar kanonisk form, fordi den resulterende model garanteres at være observerbar (dvs. fordi output kommer ud fra en kæde af integratorer, har hver tilstand en effekt på output).
Korrekte overføringsfunktioner
Overførselsfunktioner, som kun er korrekte (og ikke strengt korrekte ) kan også realiseres ret let. Tricket her er at adskille overførselsfunktionen i to dele: en strengt korrekt del og en konstant.

Den strengt korrekte overførselsfunktion kan derefter omdannes til en kanonisk tilstands-rumrealisering ved hjælp af teknikker vist ovenfor. Status-rum-realiseringen af konstanten er trivielt . Sammen får vi derefter en tilstands-rumrealisering med matricer A , B og C bestemt af den strengt korrekte del og matrix D bestemt af konstanten.

Her er et eksempel for at klare tingene lidt op:

hvilket giver følgende kontrollerbare realisering


Bemærk, hvordan output også afhænger direkte af input. Dette skyldes konstanten i overføringsfunktionen.

Feedback

Typisk state-space model med feedback
En almindelig metode til feedback er at multiplicere udgangssignalet af en matrix K og sætte denne som input til systemet: . Da værdierne for K er ubegrænsede, kan værdierne let negeres for negativ feedback . Tilstedeværelsen af et negativt tegn (den almindelige betegnelse) er blot et notationsmærke, og dets fravær har ingen indflydelse på slutresultaterne.



bliver til


løsning af outputligningen for og erstatning i tilstandsligningen resulterer i



Fordelen ved dette er, at egenværdierne for A kan styres ved at indstille K passende gennem egen sammensætning af . Dette forudsætter, at lukkede kredsløb er styrbar eller at de ustabile egenværdierne for A kan gøres stabil gennem passende valg af K .

Eksempel
For et strengt korrekt system er D lig med nul. En anden ret almindelig situation er, når alle stater er output, dvs. y = x , som giver C = I , identitetsmatrixen . Dette ville så resultere i de enklere ligninger


Dette reducerer den nødvendige egenkomposition til bare .

Feedback med sætpunkt (reference) input

Outputfeedback med sætpunkt
Ud over feedback kan der tilføjes et input ,, således at .


bliver til


løsning af outputligningen for og erstatning i tilstandsligningen resulterer i


En ret almindelig forenkling af dette system er at fjerne D , hvilket reducerer ligningerne til


Eksempel på bevægeligt objekt
Et klassisk lineært system er det af en objekts en-dimensionelle bevægelse (f.eks. En vogn).
Newtons bevægelseslove for et objekt, der bevæger sig vandret på et plan og fastgjort til en væg med en fjeder:

hvor
-
 er position; er hastighed; er acceleration
er position; er hastighed; er acceleration

-
 er en anvendt kraft
er en anvendt kraft
-
 er den viskøse friktionskoefficient
er den viskøse friktionskoefficient
-
er foråret konstant
-
 er genstandens masse
er genstandens masse
Staten ligning ville derefter blive

![\ mathbf {y} (t) = \ left [{\ begin {matrix} 1 & 0 \ end {matrix}} \ right] \ left [{\ begin {matrix} \ mathbf {x_ {1}} (t) \\ \ mathbf {x_ {2}} (t) \ end {matrix}} \ højre]](https://wikimedia.org/api/rest_v1/media/math/render/svg/089622c024d88e55fb7da811b54574235a1af4a1)
hvor
-
 repræsenterer objektets position
repræsenterer objektets position
-
 er objektets hastighed
er objektets hastighed
-
 er genstandens acceleration
er genstandens acceleration
- output er objektets position
Den styrbarhed test er derefter

som har fuld rang for alle og . Dette betyder, at hvis oprindelige tilstand af systemet er kendt ( , , ), og hvis og er konstanter, så er der en fjeder , der kunne flytte vognen i enhver anden stilling i systemet.
Den observerbarhed test er derefter

som også har fuld rang. Derfor er dette system både kontrollerbart og observerbart.
Ikke-lineære systemer
Den mere generelle form for en state-space model kan skrives som to funktioner.


Den første er tilstandsligningen og sidstnævnte er outputligningen. Hvis funktionen er en lineær kombination af tilstande og input, kan ligningerne skrives i matrixnotation som ovenfor. Det argument funktionerne kan være faldet, hvis systemet utvungne (dvs. det har ingen indgange).

Pendeleksempel
Et klassisk ikke-lineært system er et simpelt, ikke-tvunget pendul

hvor
-
 er pendulets vinkel i forhold til tyngdekraftsretningen
er pendulets vinkel i forhold til tyngdekraftsretningen
-
er massen af pendulet (pendulstangens masse antages at være nul)
-
 er tyngdeacceleration
er tyngdeacceleration
-
er friktionskoefficient ved omdrejningspunktet
-
 er pendulets radius (til massens tyngdepunkt )
er pendulets radius (til massens tyngdepunkt )
Tilstandsligningerne er så


hvor
-
 er pendulets vinkel
er pendulets vinkel
-
er pendulets rotationshastighed
-
 er pendulets rotationsacceleration
er pendulets rotationsacceleration
I stedet kan tilstandsligningen skrives i den generelle form

De ligevægt / stationære punkter i et system er, når og så ligevægtsegenskaberne punkter i et pendul er dem, der tilfredsstille


for heltal n .
Se også
Referencer
Yderligere læsning
-
Antsaklis, PJ; Michel, AN (2007). En lineær systemgrunder . Birkhauser. ISBN 978-0-8176-4460-4.
-
Chen, Chi-Tsong (1999). Lineær systemteori og design (3. udgave). Oxford University Press. ISBN 0-19-511777-8.
-
Khalil, Hassan K. (2001). Ikke-lineære systemer (3. udgave). Prentice Hall. ISBN 0-13-067389-7.
-
Hinrichsen, Diederich; Pritchard, Anthony J. (2005). Matematiske systemteori I, modellering, tilstandsanalyse, stabilitet og robusthed . Springer. ISBN 978-3-540-44125-0.
-
Sontag, Eduardo D. (1999). Matematisk kontrolteori: Deterministic Finite Dimensional Systems (PDF) (2. udgave). Springer. ISBN 0-387-98489-5. Hentet 28. juni 2012 .
-
Friedland, Bernard (2005). Kontrolsystemdesign: En introduktion til State-Space Methods . Dover. ISBN 0-486-44278-0.
-
Zadeh, Lotfi A .; Desoer, Charles A. (1979). Lineær systemteori . Krieger Pub Co. ISBN 978-0-88275-809-1.
- Om anvendelser af statsrumsmodeller i økonometri
-
Durbin, J .; Koopman, S. (2001). Tidsserie-analyse ved hjælp af statsrummetoder . Oxford, Storbritannien: Oxford University Press. ISBN 978-0-19-852354-3.
eksterne links



